
Il Michigan Scientific Trasduttore di impulsi della ruota ad alta risoluzione (WPT) è un encoder ottico che si attacca ai dadi ad alette della ruota di un veicolo. Il WPT è comunemente usato per tracciare la posizione e la velocità di un veicolo per applicazioni come la gestione della flotta e localizzazione autonoma dei veicoli. Questo caso di studio dimostrerà l'accuratezza dell'utilizzo di due trasduttori di impulsi ruota insieme, confrontando le misurazioni di posizione e velocità con i dati GPS.
Come funziona
Il segnale dell'encoder viene utilizzato per calcolare la posizione angolare e la velocità della ruota. I dati registrati da due WPT su entrambi i lati dell'auto possono essere mediati per trovare il centro, fornendo così la rappresentazione più accurata della distanza e della velocità percorsa dall'auto. I veicoli per la mappatura utilizzano spesso i WPT per compensare le interruzioni del segnale GPS, consentendo il tracciamento della distanza percorsa durante la perdita del segnale. In questo studio, l'alta risoluzione dei dati WPT ha funzionato molto meglio di quella del sensore GPS utilizzato grazie alla sua elevata frequenza di campionamento di 10,000 Hz.
Configurazione di prova
Per confrontare i risultati del Wheel Pulse Transducer con i risultati GPS, due sistemi WPT sono stati collegati a un veicolo, uno sul lato posteriore destro e uno sul lato posteriore sinistro. I trasduttori sono stati montati sulle ruote posteriori in modo che il movimento di rotazione delle ruote anteriori non dovesse essere compensato nei dati. Un dispositivo GPS è stato posizionato sulla parte superiore del veicolo, al centro del tetto sopra le ruote posteriori, dove avrebbe fornito la lettura più accurata. Le distanze e le velocità del WPT sinistro e destro sono state calcolate in media per corrispondere al segnale GPS al centro del veicolo. Il percorso di un miglio mostrato di seguito, insieme a un grafico di latitudine e longitudine dal GPS, include una rotonda e una manovra a zigzag.
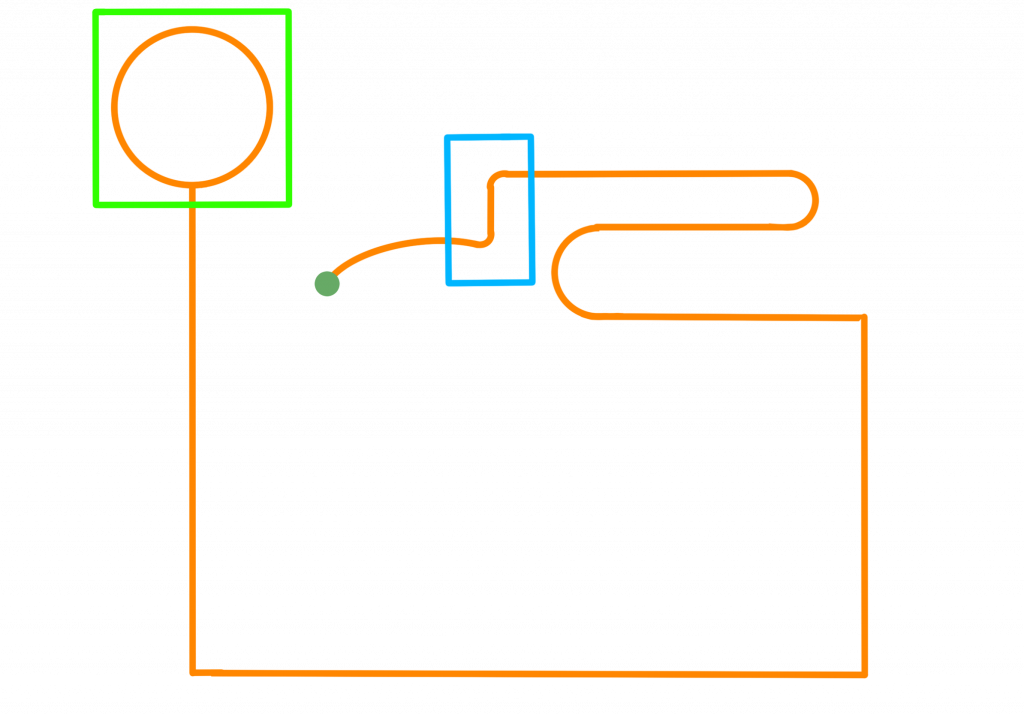
Schema del percorso di prova
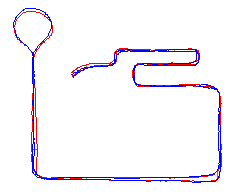
Dati GPS dalla traccia di prova
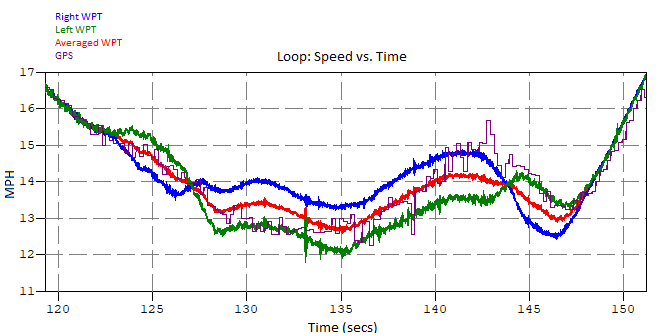
Ciclo continuo
Quando si procede in senso antiorario attorno alla parte circolare della pista di prova (mostrata in verde sopra), ci si aspetterebbe che la velocità e la distanza della ruota destra siano molto più alte della sinistra. Guardando i dati, mostrati di seguito, questo risulta essere vero. Viene calcolata la media delle velocità della ruota destra (blu) e sinistra (verde) (rosso) e si allineano quasi perfettamente con i dati GPS (viola).
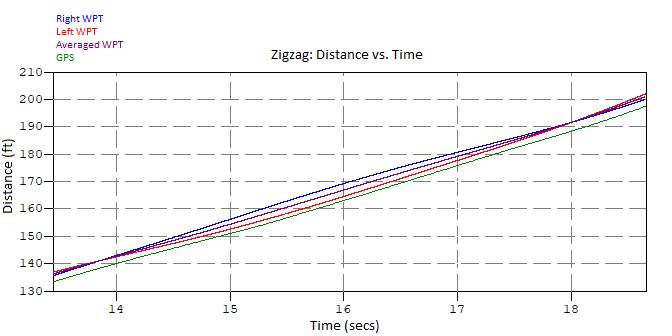
Percorso a zig-zag
L'area che contiene una rapida svolta a destra e una a sinistra, mostrata all'interno del quadrato blu sul contorno della pista di prova, offre un'altra prospettiva interessante. Per il grafico della velocità di seguito, il veicolo è stato manovrato con una rapida svolta a sinistra, quindi subito a destra. La forma a "W" creata da questo mostra che la ruota sinistra (viola) è andata più lenta della destra (verde) intorno alla curva a sinistra, quindi la sinistra è andata più veloce della destra intorno alla curva a destra. Mentre le due fazioni opposte si scambiano i posti durante la manovra, la media calcolata (rosso) e i dati GPS (blu) rimangono vicini nel mezzo.
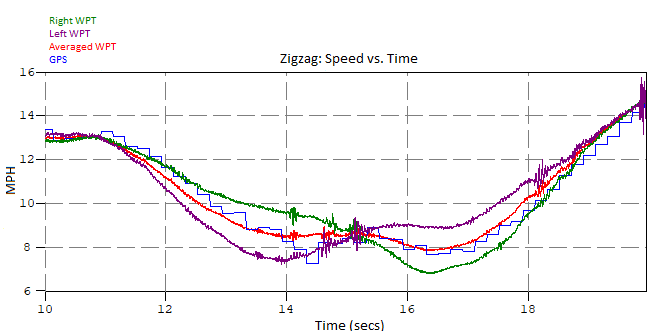
Il tempo tra i due punti di intersezione nel grafico sottostante è il punto in cui si sono verificate le svolte a sinistra e a destra. La ruota destra (blu) supera la ruota sinistra (rossa) in distanza percorsa in quanto ha un raggio maggiore per percorrere la curva a sinistra, che inizia circa 14 secondi e termina a circa 15.5 secondi. A questo punto, la ruota destra ha viaggiato più lontano della ruota sinistra. La svolta a destra inizia poco prima dei 17 secondi e la ruota sinistra raggiunge la ruota destra quando la svolta termina a circa 18 secondi. La distanza media (viola) percorsa rimane centrata tra i due. Poiché la pendenza della distanza media e il GPS sono gli stessi, stanno ancora registrando la stessa velocità e cambiano la distanza. Tuttavia, il GPS è in ritardo di qualche metro al volante, da qui il leggero offset nei dati.
Errore
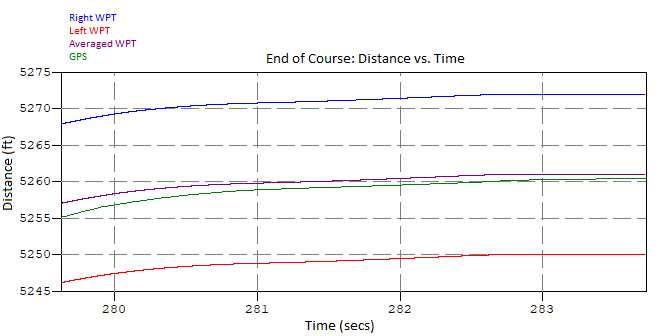
Gli ultimi punti dati del test possono mostrare i vantaggi dell'utilizzo di due WPT invece di uno solo. Se fosse stato utilizzato un solo WPT, le distanze registrate avrebbero un errore massimo dello 0.22%. Tuttavia, installando due WPT e calcolandone la media, l'errore è solo dello 0.0115%, una diminuzione di un fattore 19. Ciò dimostra che l'utilizzo di due trasduttori di impulsi ruota può aiutare a ridurre l'errore che può accumularsi su più giri.
Questo test è solo uno di una moltitudine di test diversi che utilizzano i trasduttori di impulsi della ruota. Avere un sistema di misurazione durevole e preciso è utile per tracciare con precisione la posizione e la velocità di un veicolo in qualsiasi ambiente. Se desideri discutere della tua applicazione per il test delle ruote, contattare un rappresentante del Michigan Scientific oggi.